さてさて。前回はトルクカムの動きに対して「中級編」と言えるLVでメカニズムを解説しましたが、これは正直
かなりややこしく、3次元的にモノを考えなくては理解が難しいんですが…
ですので、今回はトルクカム編からまた少し離れ、トルクカムと関係無いとは言いませんが、皆さんが
かなり興味深く追求される点である「変速比&ベルトのかかり径」等について解説してみましょう。
が、もちろんいつもながらココでも今までに出てきた各メカニズムを理解されている事が前提になりますので
分からない場合は当コンテンツを遡って読み直して頂きたく思います。
今回も後々のコンテンツ解説に必要な基礎知識になりますので宜しくお願いします。
※今回もいいかげん長くて小難しい為、ページ内リンクで目次を付けておきます。
・「変速比」とは何か
さて。いきなりですがここでは「変速比」と言うモノについての定義をご解説しましょう。
これは簡単に言いますと、文面や表記としては、駆動系のドライブ&ドリブンプーリーへのベルトの「かかり径」が
変化し、それにより起こりえる「物理的な減速比変化」という意味合いです。
この減速比というものは皆さんもご存知かと思われますが、ギヤ比等でも用いられる、ドライブ側が何回転したら
ドリブン側が1回転するか、という、「回転数の変化」とそれに伴う「伝達軸トルクの変化」にもなります。
表記的には「2.8」といった数値で表されますが、これは軸の回転数の対比が「ドライブ2.8回転にすればドリブンが
1回転」と言う事です。
もちろん実際には小数点以下の数値も踏まえますが、「回される側」を「1」とした基準での回転数の
減速表記になっていますね。
圧縮比と同じで、「2.8」ならば比率として「2.8:1」になりますが、ドリブン側回転数が1という固定表記の為、
ドライブ側が「1以下」になった場合は「0.8(:1)」とかになる事もあります。
(※「1以下」になる場合は表記上は「増速比」になりますが、混乱を避けるためここでは割愛します)
注:以下、「変速比」は「減速比」と同義の扱いとして定義します
で、もっと分かりやすいのがファイナルギヤの減速比で、これも理屈は同じなんです。
Dio-ZX系だと1次が13-41丁で2次が13-45丁ですが、両者の減速比同士を掛け合わせた数値がトータルでの
「総減速比」になり、その値は「10.912」になりますね。
が、これはあくまでクラッチの軸が何回転したかに対し、リヤタイヤが何回転回るかを表すモノなので、
クランクシャフト回転数にも変動はありますしここに「変速比」を加味するのであれば、さっきのギヤ減速比に
さらに「変速比」を掛け合わせてやれば良いんです。
ここで一例を出しますが…
仮にライブDio-ZXですが、この車両の緒元データとしては
変速比 2.850~0.860
ファイナルギヤ減速比 10.912
となっています。
が、ここで言う「変速比」は変動していく物であり、ここが無段変速である上での「減速比の変更」になっていますね。
「最大減速比2.850」とはあくまで「駆動系が一切変速していない状態」の減速比であり、ここにギヤ減速比を
掛け合わせても、それは最小変速(最大減速)状態でのリヤタイヤの回転数と言う訳です。
これは勘違いしてはいけませんが、実際に出ている速度を求める時にはこれに加え、クランクシャフト回転数と
リヤタイヤ直径が必要となります。
これについては今は割愛しますが、とりあえずは「変速比=減速比」と言うのがどんな物かを認識して下さいな。
後、もう一つ補足で…
「最大減速比」とは、「一番減速している=一番ドリブン側で力が出る」という状態ですが、これは実際には
「最小変速状態」の事を指しています。
「最小変速状態」が「最大減速比」になっているのであり、「最大変速状態」では減速比は「最小」となっている
事をお間違え無き様にお願いしますね。
…誤解の無い様に出来るだけ正しい意味合いをお勉強されることもオススメします(汗
で、前述の最小減速比と最大減速比をそれぞれファイナルギヤ減速比にかけてみると…
最小変速状態 変速比 2.850×ファイナルギヤ減速比 10.912=総減速比「31.099」
最大変速状態 変速比 0.860×ファイナルギヤ減速比 10.912=総減速比「9.384」
となります。
要は、「クランクシャフトが何回転すればリヤタイヤが1回転するか」と言う事ですね。
実際に速度に関連する目安の一つはこの「総減速比」なので、色々な車種のデータを取ってみると
非常~に面白いですよ。
・「ベルトのかかり径」と変速比変化
これは皆さんもよくご存知かと思われますが、要はドライブ&ドリブン双方共に、向き合ったお互いの
テーパー皿の距離を変え、それによってベルトのかかり径を変更して結果的にドライブ/ドリブンでの
減速比を変更していく、というメカニズムです。
…わざわざご説明する程でも無いのですが、一応の基本と言う事で(笑
いった感じの車両、という物体を教材とさせて頂きますね。
この車両の変速比は上記の通りノーマルでは「2.850~0.860」となっていますが、ここでは上にも下にも
変速幅を広げ、「3.000~0.800」という数値的にキリのいいチューン度合いになってます。
以下、これを「基準」としますので宜しくお願い致します。
変化するかと言う事ですが、これには絶対的な法則がまず存在します。
まず一つは、
これは実に単純な事ですが、まずこれをご理解頂かないとお話になりませんので(汗
ランププレートでプーリーが押され、プーリーはドライブフェイス側に向かいスライドするのが変速という
動作になりますが、「ベルトの幅」ってのは基本的に一定なので、プーリーが1㎜スライドした場合だと
同様にトルクカム皿も1㎜スライドする、と言う事です。
実際にはベルトの横幅と言うものはいくぶん潰れる物ですが、だからといってドライブ側でベルト幅が1㎜
潰れ細くなったとしても、ドリブン側は全く潰れないのか、といえばそんな事ありえませんので、ね。
これが分かっていれば、ドライブ/ドリブン双方のベルトの「落とし込み具合」や「上がり具合」も簡単に
算出したり視覚的な位置判断を行えたりしますね。
注意したい点は、よくWRの移動量増大等の手法を行う時でも、これはWR自体の移動量を増やすのは
この「プーリーやトルクカム皿のスライド量」を変化させている、という風に考えるべき、と言う点です。
スライドの数値、という意味合いです。
某社のトルクカム解説みたく、トルクカム皿の「捻り角」がどうたらなんてのは
無視して下さいな。あんなもんは本当に理解すべき点を混乱させるだけの意味の無いうんちくなので。
と言うか…皿の捻られ具合がどうトルクカムの効きに影響するのかと小一時間問い詰めたいですが。
その前に溝の角度って何の意味があるのか知ってます?って(以下略
以前にもどこかで書いたと思いますが、ベルトってのはただのゴムなので、実際に走行させて走行中に
強烈な側圧がかかったとすると、幅自体はいくぶん細くなります。
が、巷でたまに聞く「ベルトが伸びる」と言う事に関しては、ほんのわずかにはあるかもしれませんが、
実際の変速比や走行フィーリングに影響する程は伸びていないと。
これは断言させて頂きますね。
引っ掛け、体重80kgの人間がぶら下がったとしてもそんな何㎜も伸びないですよ。
前回ご説明しました「ベルトを引く力」にしても数百kgもある訳ではありませんからね。せいぜい数十kgのLVです。
なので、劣化の限界を超える程にボロボロになった物ならともかく、通常使用で「ベルトが切れる」なんてのは
いかに駆動系構成が異常であるか、と言う点もご理解頂けるかと思いますよ(笑
これはですね、プーリー等を加工する時には個人的には必須な数値なんですが…
実際にはこれをしっかりと考慮して駆動系の変速比を考えるのはちょっと難しいんですね。
あくまで、ライブDio-ZXに多少のチューンを加えた物で、仕様的には、
変速比「2.850~0.860」をプーリーのみの加工により「3.000~0.800」に変更
ベルトはノーマルのまま 「18x671㎜」
という構成になります。なお、ボスやフェイス面は一切無加工とし、ノーマルとの違いは変速比のみですね。
「スライド量」と言うのは、先述した様にベルトセット状態から1㎜単位で
プーリー&トルクカム皿が移動していく量を定義しています。
この駆動系構成の場合、プーリーストローク量(ユニットスライド量)は
「0~11㎜」となる構成に設定していますよ。
トルクカム皿の位置」を「0㎜」としているので、本当は表記にてスライド0㎜の状態でも、トルクカム皿は一杯に
閉めた状態よりも物理的に2㎜程度スライドして開いている「位置」が「始点(表中の0㎜点)」である、と言う点は
お間違え無き様にお願いします。
この数値を元に、先程の「最大減速(変速)比」と「最小減速(変速)比」を求めると…
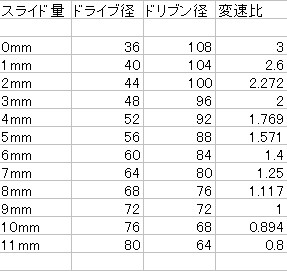
最小減速比=ドリブン側かかり径64φ÷ドライブ側かかり径80φ=0.800
…少数点以下のゼロはあえて残してますが(笑
後、フルノーマル車でもこの「変速比」という数値はサービスマニュアルに記載されていますが、
きちんとした計測を行えば実際のベルトかかり径より「変速比」が導き出せるんですね。
「ベルトかかり径」の変移も正比例して一定量で変化する
これはプーリーが1㎜スライドすればトルクカム皿も1㎜スライドする、という物ですが、これは両者の
どちらもが「正比例した同一の数値変移」であるので、まとめて「ユニットスライド量」とします。
ドライブ/ドリブン側双方で変化しますよね?
これは上記のかかり径数値を見て頂ければお分かりかと思いますが、私の分析では現在の所、
駆動系の各お皿のベルト摺動面の角度が常識的な数値だった場合ですと、
これは簡単な事ですが、テーパー面角度の違いにより、同じ角度同士の皿の距離が向き合っていて
その距離が変化した場合、間に挟まれているVベルトはどれだけ「押し出される&落とし込まれるか」という事です。
これまた厳密に言えば細かな差異は出ますが…単純にプーリーボスを1㎜長くしたとすれば、ドライブ側の
ベルトかかり径は約4㎜小さくなり、対するドリブン側のベルトかかり径は約4㎜大きくなる、と…
最小変速状態の最大減速比ってのは意外と簡単に計測出来ますが、それ以外となるとかなり難しいので
こういった理論から逆に導き出すと言う事も大切だ、だと私は考えています。
…ちょっとデカいですが画像ちっこいと値が見えなくなるのでご勘弁をば(笑
これは単純にグラフにしてみれば分かりやすいのですが、ベルトかかり径自体の変移量がユニットスライド量に
対し比例して変化して行くのがお分かりでしょうか。
…ベルト駆動ってのは意外ときっちりしているモノなんですよ(笑
先程のベルトかかり径から変速比を逆算すると、以下の表になりますね。
変速比を導き出すのは実は簡単だったりするんですよ。
これは後述しますが、「変速比」さえ分かってしまえばプーリーが
何㎜動けば何km/h出ているか、等の速度計算も可能なので、
実際の駆動系構成や「限度を超えない」ハイスピードプーリーの
作製にも大変役立ってきますね。
…私の言う「やりすぎは禁物」とかってのは実はこのあたりの数値計算から来ているという事も補足として
付けておきます(笑
「変速進行によるトルクカムの効きと軸トルク減衰率のうんたら」って感じの物に大きく絡んでくるんです。
カンの良い方であればすでに私が何を言わんとするかをお分かりだと思いますが、実はこの辺に
トルクカムに関する大きな秘密、勘違いしやすい点が含まれているので…が、それはまたの機会に。
上記の変速比換算の表ですが…これは「最小変速状態」でのベルトかかり径は36㎜/108㎜になっていますよね?
これだと、額面通り受け止めれば最小変速状態の「ベルトかかり径を計測した」と考えられると思います。
が、これははっきり言いますが、「それだけ」では無いんですよ。
「最小変速状態=0.35㎜スライド時&最大変速状態=10.35㎜スライド時」の「変速比」と同等な数値に
なるんですが。
その場合、「0.35㎜のユニットスライド」では「ベルトかかり径は直径で1.4㎜」変化するので、変速比においては
最小変速状態=「37.4㎜/106.6㎜=2.850」程度
最大変速状態=「77.4㎜/66.6㎜=0.860」程度
となります。
…ほんのわずかの誤差はあるんですが、これなら近似値として良い範囲だと思いますよ(汗
「元々」のデータ自体がベルトかかり径の「実測値」から拾ったモノですが、これなら私も細かい事は
言いませんね。ライブDio-ZXのノーマル変速比だとこの位で、ユニットスライド量も約10㎜、といった
解釈になっていますよ。もっと分かりやすく言うとボスを0.35㎜伸ばせば最大減速比だけは2.860→3.000まで
高められる、って事です。(もちろんベルトは同一寸法ですよ)
じゃあ試しに、ライブDio-ZXを持ってる方、もしくはホンダ大径駆動系車を持ってる方はですね、
ライブDio-ZXと全く同じ駆動系構成を放り込み、18x671㎜程度のベルトを突っ込んでみて、
その状態で一度エンジンを掛けきちんとベルトを「張った」上で、ベルトかかり径を計測してみて下さいな。
プーリー&ドリブンユニットを回して線を引く」と思われますが…
ドリブン径106.6㎜には絶対にならないんです。
そうですよ。私ももちろんそうやって、「ベルトの外側にマジックを当てて」数値拾っていますけども…
が、これはですね、この手法ですと「ベルトの一番外側」の「かかり径」を測っているだけなんです。
このVベルトってやつはですね、実際に側面がテーパー皿の摺動面に対しグリップしているモノですが、
側圧もベルト側面に対し一定にまんべんなくかかるのであれば話は別ですが、テーパーユニットである以上
ドライブ/ドリブン双方での「Vベルトの外側のかかり径」同士を計測しても、イコールで減速比とはならないんです。
が、これは個人的な意見で申し訳ありませんが、ちょっと簡単には公には出来ないんです、と言いますか
したくないんですね(汗
…今までにも色々な事を解説はして来ていますが、ここまでぶっちゃけてしまうのはさすがにイヤです(断言
これは長い年月をかけて解析し裏付けも得た、とーっても苦労した事の一つなので。
この変速比ってやつは…上記でご説明した様に「減速比」でもあるんですよ。
となれば…「減速比」ってのは分解をせずとも簡単に判断する手法、ありますよね?
それさえ分かれば、ノーマルだと駆動系の「変速比」ってのはサービスマニュアルに載っているのですから
どこをどう補正すれば「実測から本当のかかり径になるのか」を導き出す事が可能ですよ。
これも圧縮比計算みたいなモンで、一度分かってしまえばいくらでも応用は利くものですから。
ここまで読んで理屈を理解して頂けた方でしたら、私と違いすぐに気付かれると思いますし。
…頭の切れる方だと「なーんだ」と思われるかもしれませんが、元々数学とか得意じゃない私の場合は
それに気付くのにかなりの時間を要した、って事なのでご容赦下さいな_| ̄|○
今回は明確な数値とデータを出しましたので、いつもみたくわけわからんって事は無いと思います(汗
こういった点を考えていくのが「変速比」を考慮すると言う事であり、これが無けれぱハイスピードな
プーリーも有用なトルクカムもまず作れないので。
ちなみに、いくら変速比だけを計算しても、実際の運用においてこれでは無理がありすぎる、とかってのは
ある程度それらをパーツに反映出来る能力と体感出来る経験も必要ではありますが…
それらが全部簡単に出来ちゃったら私も含め誰も苦労はしませんよね(笑
・変速比の決め打ちによる速度計算式等&タイヤ外径の「潰れ」の加味
こういったベルトかかり径の変化により「変速比」が変化していき、それにより「実際に出ている速度」を
導く事も出来るのですが、これをちょっと補足で入れておきますね。
さらにギヤで減速させて、その「1時間あたりの回転数」にて、「タイヤ外周」が何km進んでいるか、
と言う計算です。もちろん時速の単位は「km/h」なので、タイヤ外周値はkm換算しないと駄目ですね。
これで、「1時間あたりに進む距離」が出せます。
計算をしてみましょう。
・最大減速比 3.000
・最小減速比 0.800
・ファイナルギヤ比 10.912
・リヤタイヤ外周(3.50-10 負荷時直径) 1284.88㎜ (≒0.00128km)
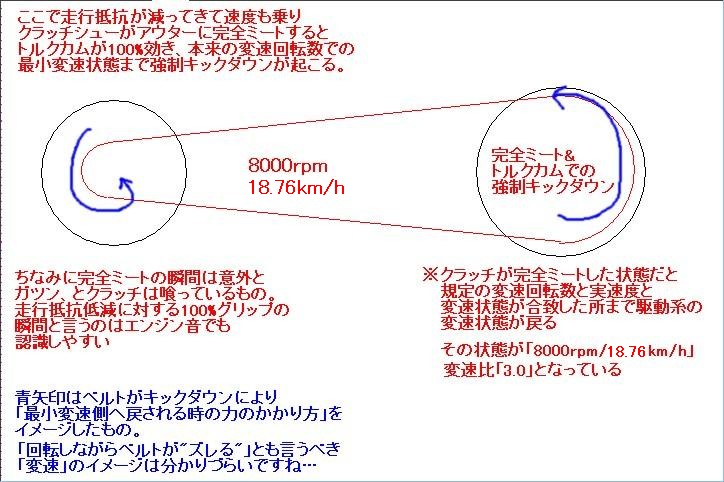
8000×60÷3÷10.912×0.00128=18.76km/h
最大変速(最小減速)状態=
8000×60÷0.8÷10.912×0.00128=70.38km/h
こういう式ってありますんで、前述の様に変速比さえ計測&算出出来れば、
速度が何km/h出ていればどの位の変速状態なのか
判断出来ますよね?
が、エンジンの仕様は個人個人で全く違いますから…仮にハイギヤを入れている上に変速回転数が
10000rpmとかのエンジンを使われている人の場合、ノーマルの様に「45°溝が終わる」速度域が
35km/hとかでは無く、55km/hとか60km/hの時点とかだったりする場合も普通にあります。
使って走っているのと同義なので、常用している速度域では駆動系のアクセルOFF時のシフトアップ量が
増大したり、走行負荷の減衰に対するトルクカムの効き過ぎを常に誘発している事にしかなっていませんからね。
(これは今後のコンテンツで詳しく解説します)
いう物も把握しておく事が必要、となって来ると言う事です。
これらもある程度理解しておかないと、自分が常用する速度域にて45°→60°という溝の特性を期待して
入れたつもりのクレアカムが、実は45°一直線モノを入れてるのとほぼ同じ「溝の使い方」だった、って
アホらしいオチになったりもしますんで、ね…
それは何かと言いますと、タイヤ外径の「潰れ具合」なんです。
この速度計算式と言う物は使われている方も多数居られると思いますが、「実走行でのタイヤ外径の補正」を
行われている方はなかなかおられないのでは、と思いますので。
かなり潰れている為、実測の直径や外周から算出した直径では、「出来る限り実走に近い速度計算」を
行うには役不足だ、って事です。
簡単にこの「潰れている」ってのを体感したい方は、リヤタイヤ外周に柔らかいメジャーを巻いた上で
誰かに乗車して貰い、どの程度「外径」が変わるかを測ってみれば良いですよ。
「車体からホイールを取り外した状態で計測した数値」とは明らかに変わりますからね。
分かりやすい一例として、バイクではなく車のタイヤを真正面から見てみれば一目瞭然です。
車重が違いすぎるからってのは関係無く、ただのゴムが潰れないなんてありえない、と言う事で。
メーカーのタイヤ外径や外周の数値を元に速度計算をした事がある方ですと、実際の補正を入れると
かなりマイナスな値になってしまいますんで。
が、それはある意味スピードメーターよりも確実に正確に近い現実なので受け入れなければ駄目ですね。
「タイヤ外径潰れによる誤差」を加味しないと話にならないです。
回転数はタコメーターで実際に確認出来ますよね?
となれば、「実走」にてそこまで回っているのだから、タイヤもそれに比例した回転数で無いとおかしいですし。
実走行のタコメーター表示は「走行抵抗がかかっている上でそこまで回っている」
のですよ。
実走行にて各種抵抗が過大であるのであれば、そもそもそこまで回転数が上がらないですからね。
「理論上最高速」と言うのはタイヤ潰れの補正を加え、なおかつ実走行での最大変速後の
エンジン回転数が維持出来ていれば、それはイコールで最高速度になっている、と言う事です。
「計算上はこれだけ回ったらこの速度が出るはずなのに出ていない&狂ってる」と言うのは、大抵の方が
この「タイヤ潰れ」を加味していないからそう思えてしまうんです。
それは速度計算の値から外れるという物ではなく、「加味するべき物が根本的に足りていない」んですよ…
変速回転数は一番おいしいと思われる7000rpmに調整し、変速終了後はMAX8000rpmまで引っ張ったとしましょう。
変速比はノーマルのままで0.860、リヤタイヤは90/90とすれば、
7000×60÷0.860÷10.912×0.00121=54.15km/h
8000×60÷0.860÷10.912×0.00121=61.89km/h
ちょっと前にこのお話はしたと思いますが、ノーマルだとそんなものなんですよ。
…とは言ってもノーマルのスピードメーターってのはかなりのハッピーメーターなので、実際には
「メーター読み」だともっと速い数値を指しますけれどね(笑
ちなみに私は「計算式による速度表記」には全て上記の実「速」補正を掛けていますのでよろしくです。
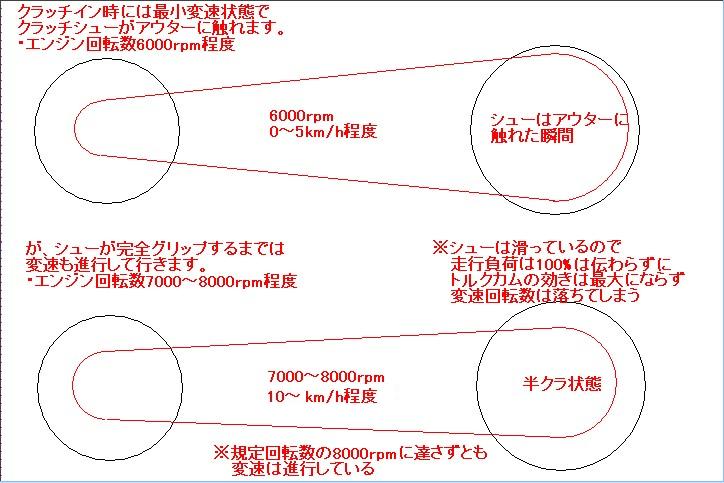
では次に、実際の走行状態にて行われる、駆動系の「変速比の変化」という物についてご説明します。
では、ここでは数値を分かりやすくする為に、ちょっと変速比を広げるチューンを行った駆動系のライブDio-ZXと
さて、この「変速比の変動」を持った駆動系の場合、実際にベルトの「かかり径」と言うのはどういう風に
・プーリーの横スライド量=トルクカム皿の横スライド量
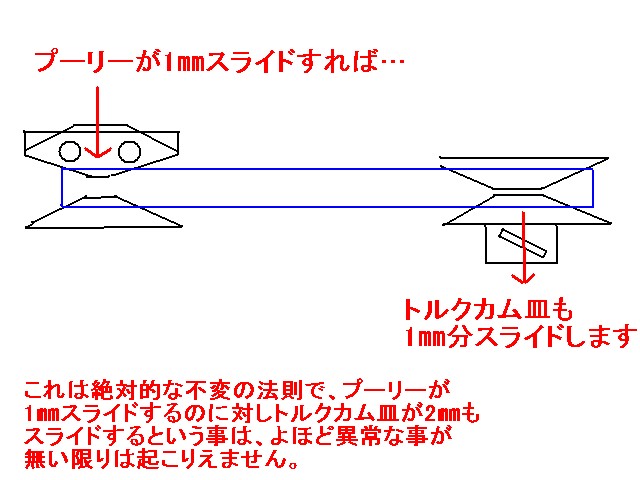
と、単純にこういう事になります。
それとここで注意点を一つ挙げておきますが、ここで言う「スライド量」というのは「ベルト方向へ対して垂直」の
あ、そしてもうひとつ補足を一つ入れておきますが。
これはですね、「引っ張り強度」ってのはこういうベルトでも十分すぎる程にありますんで、仮に天井にベルトを
さて。次にこの「変速比」という物を具体的に数値化してみましょう。
では、ここで先程の駆動系構成を一例とし、実際のベルトかかり径となる数値の一覧表をご覧下さい。
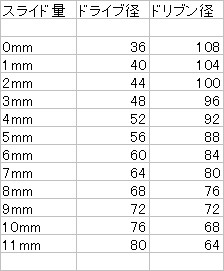
上記の駆動系構成だと、実際のベルトかかり径と言う物はこうなります。
※これだとトルクカム皿のスライドも0㎜から始まる様に見えますが、これはあくまで「ベルトセット時の
と、簡単ではありますがまずはこの「ベルトかかり径」をご覧下さい。
最大減速比=ドリブン側かかり径108φ÷ドライブ側かかり径36φ=3.000
そして次に、
・「プーリー&トルクカムの横スライド量」の変化量が一定であれば
これは簡単にご説明しますと、先述の「ユニットスライド量」ってありますよね。
この「ユニットスライド量」に対し、仮に1㎜のユニットスライドが起こると、ベルトかかり径ももちろん
ユニットスライド量1㎜に対し、ベルトかかり径は直径で約「4㎜」変化する
と言う事を基準としています。
実はこれだけの事なんですが、これを逆手に取れば、
実際には計測自体が不可能な、「どれだけ変速が進めば何km/h出ているか」
という、トルクカムの使い方等を考えるにあたり非常に有用なデータが取れるんですよ。
では、次に先程のユニットスライド1㎜ずつの変移に対する、ベルトかかり径変移を記録したグラフをご覧下さいな。
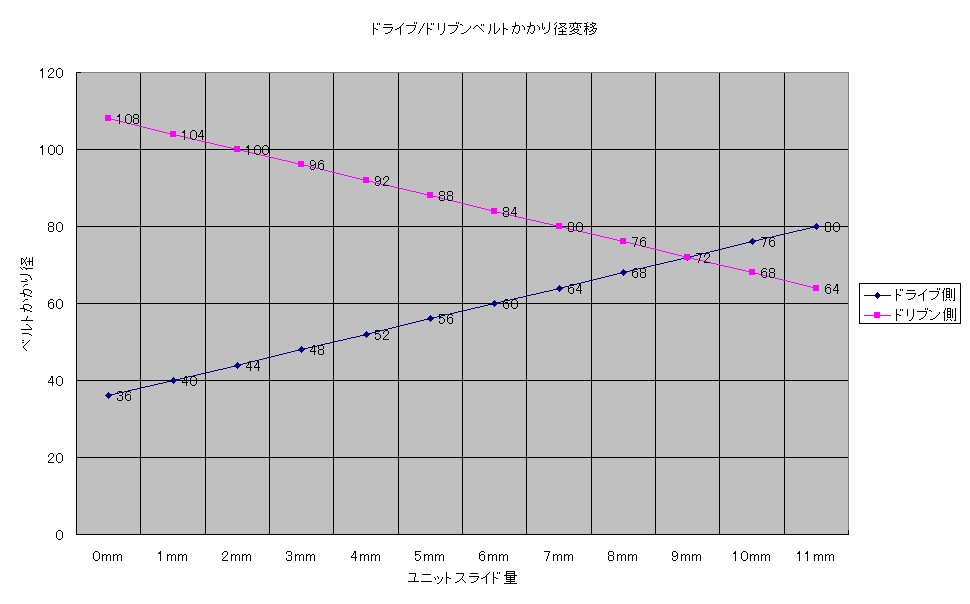
と、これが上記の変速幅を持つドライブ/ドリブンでの、「ベルトかかり径変移」のグラフになります。
で、表記通り、x軸がユニットスライド量でy軸がその時のベルトかかり径ですね。
そしてこの「ユニットスライド量」と「ベルトかかり径」が判明すれば、実際の「変速比」も割り出せます。
この様に、まず最初に「最小変速比」が分かっていれば、その後の
あ、ちなみにですね、ここで記してある「変速比(減速比)」なんですが、これは別の機会に解説予定である
で…ここでひとつだけものすんごく大事な注意点を挙げておきます。
仮に…上記の表の元となった、ライブDio-ZXのノーマル変速比を例に挙げますが、おおむね上記の表の
で…これだと結局ベルトかかり径の「実測」から求めてんじゃねえか、って言われそうですが(笑
おそらく、実際のベルトかかり径を測れ、と言われると…99%の方が「ベルトの外周にマジックを当て、そのまま
残念ながら
この手法で計測した数値は
上記の「ベルトかかり径」の数値とは
程遠い値になります(汗
上記のライブDio-ZXの「ノーマル構成」にてベルトかかり径を外周で測ってみても、ドライブ径37.4㎜で
…「お前はそれを計測してから逆算したって言ったじゃねえか!」ってツッコミ入りそうですが(笑
ベルトの「側面の最外周側」が
一番最大のグリップ力を
発揮している訳では無く
実際の「ベルトかかり径」となる点(線)は
ベルト側面最外周の部分では無い
…これは難しいので詳細は割愛しますが、仮にプーリーやフェイスにテーパー角度が無く、なおかつ
じゃあどうやって数値を出したんだ、と言われれば…正直、後は計算で確実に寸法を出す手法はあるんですよ。
が、これではただの嫌味にしかなりませんので、ヒントだけは出しておきます。
とまあ、かなりややこしい事になってしまいましたが。
さて次に。
まず、ここで「速度計算式」を少々。
エンジン回転数×60÷駆動系減速比÷ファイナルギア総減速比×タイヤの外周(km)=時速
「時速」を求めるので、まず「分速」であるエンジン回転数に60を掛け、それを駆動系で減速させ
では、これに先程の車両の最小&最大変速状態の変速比を代入し、他は下記の条件にてひとつ
・変速回転数 8000rpm
とした場合、最大&最小減速比の状態にて出ている速度は
最小変速(最大減速)状態=
となりますね。
プーリー&トルクカムが何㎜スライドすれば何km/h速度が出ているか&
…簡単な所で、仮にDio-ZX系でクレアカムを使うとすれば、「溝の折れている所では何km/h出ているのか」も
これだと普段60km/h巡航する事が多いのであれば、常用する全ての速度域にて45°トルクカム溝を
こういった事を防ぐ為にも、ある程度の速度と変速状態の兼ね合い、そして各パーツの「担当範囲」と
そしてここで、上記計算式を使うにあたっての大事な補足を入れておきますね。
詳しくは下の絵をご覧頂きたいのですが、簡単に言いますとタイヤ接地面ってのは思っているよりも
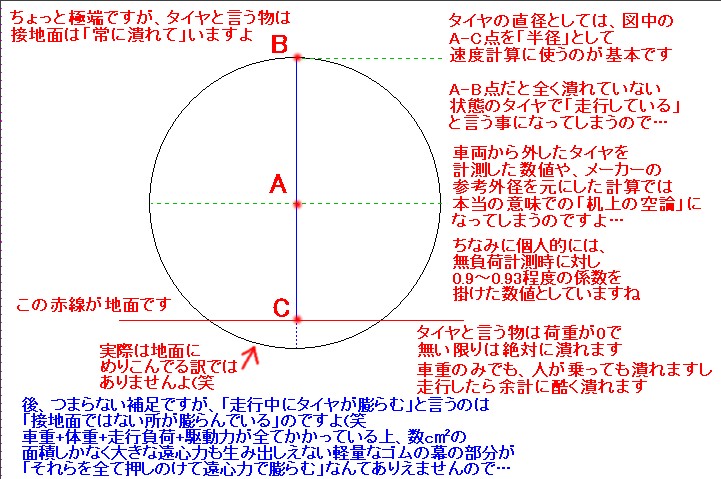
とまあ、実に簡単な事なので補足はこれだけって事で(笑
…とはいっても、ある意味これは知らない方が幸せな知識だったりもするんですけれどね(笑
もちろん、実際の走行においては路面&空気抵抗もありますが、それらを加味するうんぬんの前に、この
これも良い機会なのでお話しておきますが、「空気抵抗」がいくらあるとしても、実走行状態にてエンジンの
そもそも、
実際に走行している回転数=速度に、空気抵抗や走行抵抗を加味する必要なんて無いんですよ。
これまた言葉キツいですが…正確なパルス式スピードメーターやサイクルメーターを使っている上で
そして仮にライブDio-ZXのフルノーマルに上記計算式を当てはめると…
変速終了の瞬間で
最大変速後、8000rpmまで引っ張れば
と、こうなります。
こう考えれば、「ノーマルで7000rpm変速での変速終了」ってのはわずか54km/h時、って事も導き出せますよね。