さてさて、今回は表題通り、「WR遠心力がプーリーを押し出す力」について記してみたいと思います。
とはいっても、その力が分かったところで何の役に立つんだ、という突っ込みもあるかと思いますが…
これは実用的な面において、なおかつプーリーそのものの良否判断にも通ずる部分があるので、その
あたりに興味がある方は是非最後までお読み頂きたく思いますです。
※定番ページ内リンクです。
・WR遠心力の計算式
さて、ここを見られている皆さんであれば、スクーターのWR(ウェイトローラー)がどんな働きをしているのかは
おおむねご存知かと思われますが、改めて記しますと
その遠心力がプーリーを「横方向」にスライドさせる力に変換されている
WRを回転させてその「総重量」を用い「遠心力」を生み出しており
そのWR重量調整で変化させる「変速回転数」についてはざっとだけ記しますが…
まず、トルクカムでベルトを張る(挟む力)と、センタースプリング反力の合力であるドリブン側の
「ベルト側圧」が最初にありきで、ドライブ側WR遠心力でプーリーを押し出す力がその
ドリブン側合力を上回った時点で初めて「変速=加速が始まる」という事になります。
トルクカム側合力というモノの計算式は、当HPでこれを記している現在ではまだ公開してはいませんが
実際には存在はしますのでそういうものだ、という事でよろしくです。
では早速ですが、「遠心力」の計算式としては
質量(kg)×半径(m)×角速度(ω)^2(2乗)
「質量」はWRの総重量になり、単位はkg換算なので仮に総重量51gだとすれば「0.051kg」です。
「半径」というのはWRが回転している位置の半径、という事なのですが…
これ、仮にホンダ系大径プーリーであれば、クランクシャフト中心点からWRの中心位置までは「約23㎜」と
なっているので、最小変速状態のWR回転半径をm換算すれば「0.023m」となります。
そして次に「角速度」という数値なのですが…
これは、「物体が回転している速さ」を表しているものであり、「rad/sec」ラジアン・パー・セコンドと読みます。
(※ラジアン毎秒、とも読みますし式上での表記はω(オメガ)です)
この角速度が判明しない限り、遠心力というモノは把握出来ないのですが、要は単位時間あたり何度くらい
回されているのか、という事なんですよね(笑
その角速度の計算式は、
角速度ω=2πn
なので、2×π×n(回転数)なのですが、この場合のnは「毎秒」の回転数になりますから、変速回転数が
6000rpmであったとすれば、これは「毎分」の数値ですから「毎秒」に換算すれば「100rps」です。
(※「ぱー・みにっつ」ではなく「ぱー・せこんど」という事ですね)
で、これで回転数(rps)も出ましたから、角速度の計算を行ってみますと
2×π(3.141592…)×100(rps)=
628.31853…rad/sec(ラジアン・パー・セコンド)
と、必要な数値が揃ったところで次に「遠心力」の計算になりますが。
計算式としては「質量×半径×角速度^2」なので
×
半径0.023m
×
角速度の2乗=(628.31853…×628.31853…)=394784.18…
=463.08184…
質量0.051kg
しかし、ここで大切なのは、この解の「単位」としては「N(ニュートン)」であり、
「kgf(キログラム重、キログラムフォース)」ではありません。
なので、Nをkgfに換算する為に解を9.80665で割ってやりますが、そうすると
463.08184…(N)÷9.80665=47.2212(kgf)
結果、WR総重量が51g、回転半径がホンダ系大径プーリーの最小変速状態の23㎜程度で、変速回転数が
6000rpmの場合であれば、WRが発生している遠心力は約47.2kgf程度となります。
が、これはあくまで「WRの遠心力」であって、この力が実際にプーリーを押し出す力に変換されるにはもう
ワンクッションだけ作用があるので、次はそちらをご説明しますね。
・ランププレートとWRガイドの角度の作用
これは先程算出したWR遠心力がありますが、その力はクランクシャフトに対して「垂直方向」に働きますよね。
実際には回転しているので円周上にその力が発生している訳ですが、この力を90°真横に向けた方向、
すなわちプーリーを「真横」にスライドさせる力に変換しているのは、WRガイド&ランププレート角度に
なります。
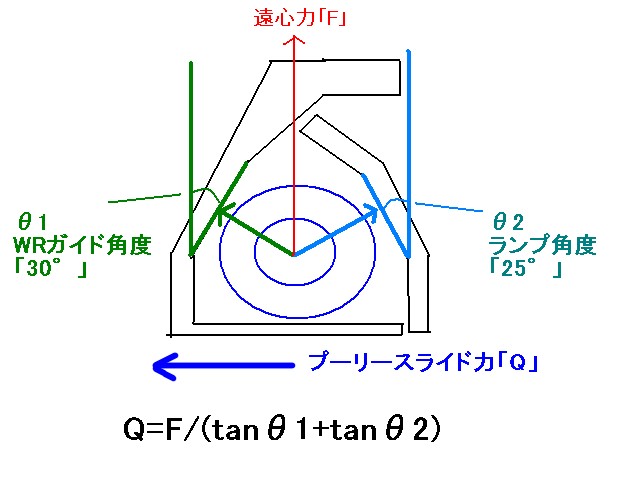
これはイメージをいつもの下手絵で記しますのでそちらもどーぞ。
WRガイド角度は「30°」でランプ角度は「25°」になっています。
が、これはあくまで「斜面の角度」なのであり、計算式に必要な「θ1&θ2」を求めるには、図中にも
ありますが「tan(タンジェント)角度」になりますね。
・ランプ斜面側=tan25=0.4663
変換される場合はこうなる、という事です。100%のままでは無いんですよね。
ランプ角度は25°の場合、プーリーを押し出している力は「45.24kgf」程度である
遠心力のみを考えていると、WRガイド角度やランプ角度なんてどうでもいい、といった事になってしまうのは
言うまでもありません。
で、ここで少し閑話休題としますが。
上記の下手絵は記憶にある方もおられるかと思いますが、これは古くはスクーターチャンプの2001か
2002に掲載されていた図解であり、それに角速度を加味した上で実際のWRガイド角度やランプ角度を
追記してみた、といった絵になります。
スクーターチャンプの図解ではページの制限もあるでしょうから、あまり深くは突っ込まれてはいませんが
実際に物理的な力を求めるには、今回記している様な数値の加味が必要である、という事で。
ホンダDio-ZX系のプーリー構成の場合、HG刻印のランププレートは25°一律角度なのですが、WRガイドは
最初は30°から始まり、最終的には35°までスロープ的に変化しています。
なっている計算を行う場合は、まずはWRの回転半径を加味せねばいけませんが、それに加えてWRガイドの
角度も一律ではなく変化しているので加味しなければいけない、という事になるんですよ。
ちなみに、ホンダ系統のプーリーだとWRガイドに加えてさらにランププレート角度まで2段に折れていく
物も存在しており、そちらも加味しなければならない場合もある、という点も忘れてはいけませんね。
計算式の一環で、「tanθ」を用いる部分がありますが…これは計算が面倒な場合、Windowsにオマケで
付いている関数電卓を呼び出し、仮に角度が30°なら30と入力して「tan」を押せば答えが出てきます(笑
いつも言ってますが、私は数学をあれこれと解説したいのではなく、その計算式等をどうやってスクーターの
動作原理の解析に使うのか、をお伝えしたいワケなのでよろしくです。
ある程度の理論さえ分かっていればそういった物を使うのも悪くないと思いますよ。
次に、WRの遠心力を物理的なプーリーを押し出す力に変換してみましょう。
この計算式においては、当HP内の「駆動系の熱ダレについての一考 補足編」でも少しだけ出していますが
遠心力(F)/(WRガイド角度tanθ1+ランプ角度tanθ2)
モデルはホンダDio-ZX系のプーリーとしていますが、このプーリーだとWRが最小変速状態であれば
…いつもの事でこの三角関数は端折らせて頂きますが、解としては
・WRガイド斜面側=tan30=0.5773
そして両方を足した数値は(0.5773+0.4663)=1.0436であり、これに先程のWR遠心力を加味すると
47.2212(kgf)÷1.0436=45.2483(kgf)
WR総重量が51gで、WR回転半径が23㎜、変速回転数が6000rpmでWRガイド角度が30°、
…遠心力とそんなに変わらないじゃないか、と思われるかもしれませんが、仮にこれを無視してWRの
なお、図中ではWRガイドもランププレートも一発角度ではなく2段階に折れている絵を描いていますが
WRの回転半径は変速して加速が進むにつれどんどん大きくなっていくので、もっと変速比がハイギヤ傾向に
後、つまらない補足になりますが…
なお、遠心力の計算そのものはWEB上での数学サイト等で簡単に計算出来る便利なところもあるので
